现代控制理论 ——05 控制系统的李雅普诺夫稳定性分析
# 控制系统的李雅普诺夫稳定性分析
# 李氏稳定性的定义
何为平衡状态?对于一个系统 x˙=f(x,t),若果存在状态 xe 满足 x˙e≡0,那么该状态即为平衡状态。
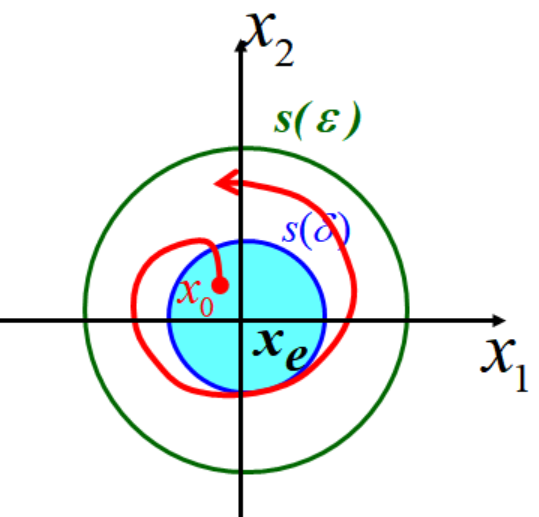
- 稳定:对于任意实数 ε>0,都存在一个实数 δ>0 满足 ∣∣x0−xe∣∣≤δ,从任意 x0 触发的解都能够满足 ∣∣xt−xe∣∣≤ε,则称 xe 在李雅普诺夫意义下是稳定的。
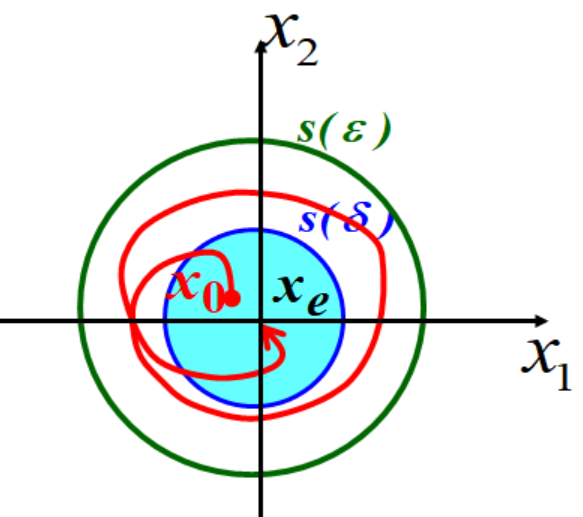
- 渐进稳定:当上述解能够满足 ∣∣xt−xe∣∣≤μ,也就是能够收敛到 xe 时,则称系统渐进稳定。
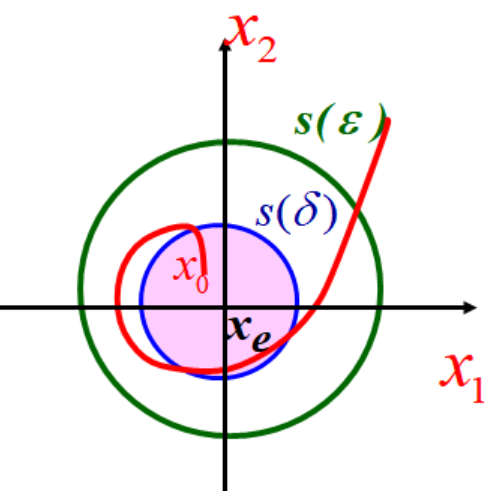
- 不稳定:无论 δ 有多小,都会使得 ∣∣xt−xe∣∣>ε,则称系统不稳定。
![]()
![]()
![]()
大范围渐进稳定:从状态空间中所有初始点出发的轨迹都具有渐进稳定性,那么状态 xe 为大范围渐进稳定。
正定函数:对于函数 V(x),在区域 S 内的所有 x 都有:① V(x) 中的各分量的偏导均存在;②V(0)=0 ;③当 x=0 时, V(x)>0(V(x)≥0) 。则称该函数是正定 (半正定) 的。
# 李雅普诺夫第一方法
- 线性系统的稳定性判据
李雅普诺夫稳定的充要条件:系统矩阵 A 的全部特征值实部大于 0,即位于复平面左半部。
- 非线性系统的稳定性判据
对于非线性系统 x˙=f(x),讨论其在可能平衡状态 xe 的稳定性。引入新向量 y=x−xe,那么系统的状态方程转换为 y˙=Ay+G(y)y,其中 A 为雅克比矩阵。
......
# 李雅普诺夫第二方法
对于状态方程为 x˙=f(x,t),f(0,t)=0 的系统,存在一个具有连续偏导的标量函数 V(x,t),满足
V(x,t) 正定,V˙(x,t) 半正定,则系统在原点一致稳定;在此基础上,若对于任意 t0 和 x0=0,在 t≥t0 时不恒等于 0,则系统在原点渐进稳定;在此基础上,若随着 ∣∣x∣∣→∞,V(x,t)→∞,则系统在原点大范围渐进稳定。
V(x,t) 正定,V˙(x,t) 正定,则系统在原点不稳定;
例题
用李雅普诺夫第二方法判断以下系统的稳定性。
x˙1=−(x1+x2)−x22x˙2=−(x1+x2)+x1x2
系统存在的唯一可能平衡状态为 x1=0,x2=0,取标量函数 V(x)=x12+x22,显然 V(x) 正定,求导有
V˙(x)=2x1x˙1+2x2x˙2=−2(x1+x2)2
负定。除原点外有 x1=−x2 使得 V˙(x)=0,但是系统状态仍在转移中,故 V˙(x) 不会恒定等于 0。且随着 ∣∣x∣∣→∞,V(x)→∞,故系统在原点大范围渐进稳定。
:::
# 李雅普诺夫方程判断线性系统的稳定性
在连续系统 x˙=Ax 中,在平衡状态 x=0 处是大范围渐进稳定的充要条件:对于给定的正定对称实矩阵 Q,存在一个正定实对称矩阵 P ,满足 ATP+PA=−Q。(其中 xTPx 就是李雅普诺夫函数 )
在离散系统 x(k+1)=Gx(k),在平衡状态 x=0 处是渐进稳定的充要条件:对于给定的正定对称实矩阵 Q,存在一个正定实对称矩阵 P ,满足 GTPG−P=−Q。(其中 xTPx 就是李雅普诺夫函数 )
例题
以下系统的平衡状态在坐标原点,判断其渐进稳定性。
x˙=[0−11−1]x
设 P=[p11p12p12p22],由 ATP+PA=−I 有,[01−1−1][p11p12p12p22]+[p11p12p12p22][0−11−1]=[−100−1],则 ⎩⎪⎪⎨⎪⎪⎧−2p12=−1p11−p12−p22=02p12−2p22=−1→⎩⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎧p11=23p12=1p22=21,得到 P=[2321211],验证各阶主子行列式是否大于 0:P11=23>0,P22=det[p11p12p12p22]=45>0,故矩阵 P 正定。故系统在原点大范围渐进稳定。
以下系统的平衡状态在坐标原点,判断其渐进稳定性。
[x1(k+1)x2(k+1)]=[0−0.50.5−1][x1(k)x2(k)]
设 P=[p11p12p12p22],由 GTPG−P=−I 有,[00.5−0.5−1][p11p12p12p22][0−0.50.5−1]−[p11p12p12p22]=[−100−1],得到 P=[27522740274027100],验证各阶主子行列式均大于 0,故矩阵 P 正定。故系统在原点大范围渐进稳定。